Humanoid Robot Motion Regime Detection
Real-Time Behavioral Anomaly Detection with Implications for Reflexive Edge AI
As humanoid robots transition from labs to factories and homes, a critical capability gap remains: detecting behavioral degradation without labeled failure data. This study demonstrates processing at 930 Hz - fast enough for machine reflexes that respond before the central controller knows something is wrong.
The Unsolved Problem in Robotics
Current approaches to robot anomaly detection face fundamental limitations that prevent scaling to the emerging humanoid robotics market.
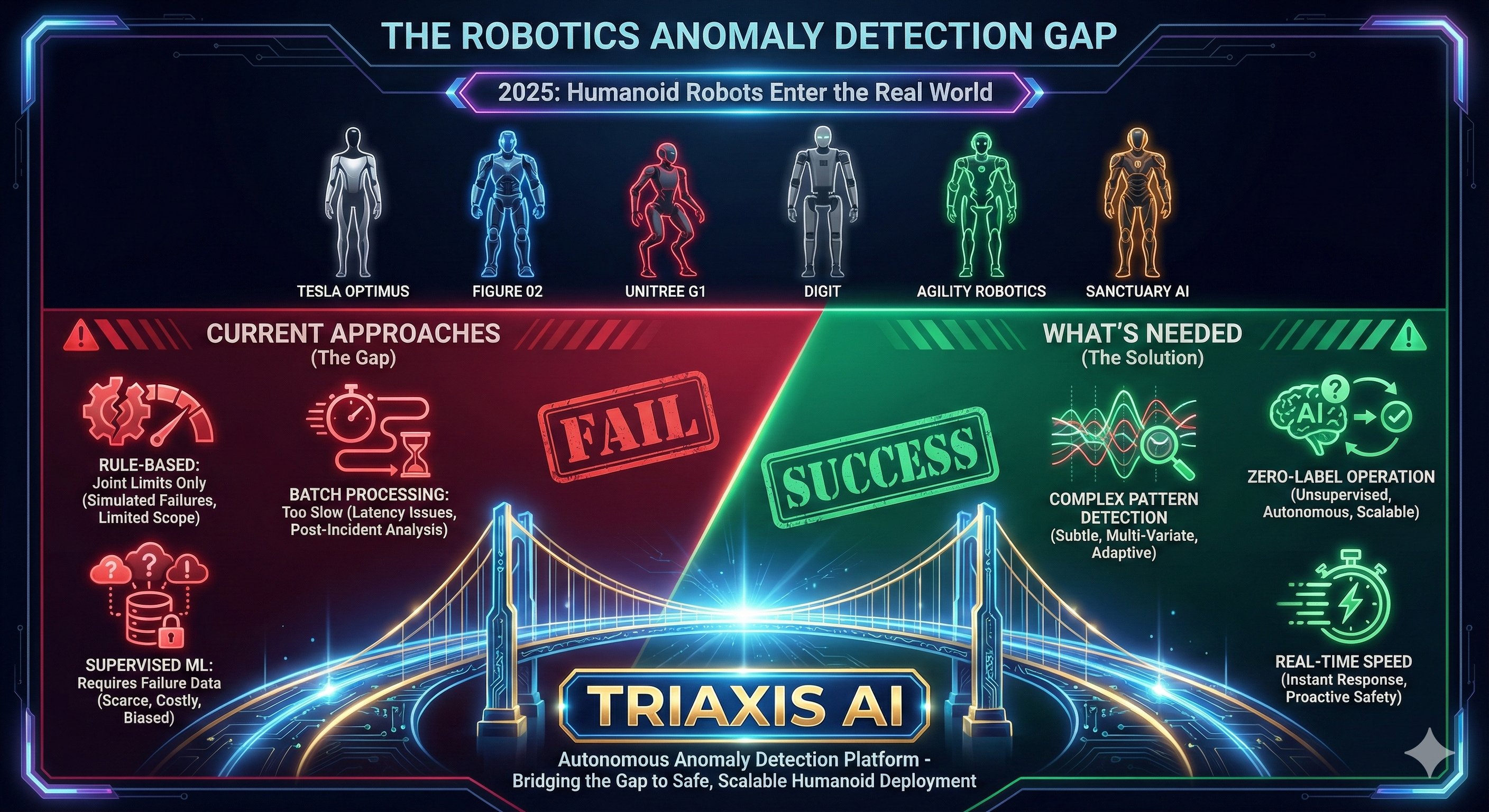
The gap between current robotics monitoring capabilities and what the industry needs
Current Limitations
- -Rule-based monitoring: Cannot detect complex multi-joint degradation patterns
- -Supervised ML: Requires labeled failure data that is expensive/dangerous to obtain
- -Simulation-trained: Sim-to-real gap means patterns don't transfer
- -Post-hoc analysis: Too slow for real-time safety intervention
The Labeling Problem
To train supervised anomaly detectors, you need examples of failures. For humanoid robots, this means:
- 1.Physically damaging expensive hardware
- 2.Waiting for real failures (dangerous)
- 3.Simulating failures (unrealistic)
None of these scale. Triaxis AI solves this with zero-label operation.
Watch the Explainer
A brief walkthrough of this research and its implications
The OmniRetarget Dataset
Motion trajectories from a Unitree G1 humanoid robot - a full-size bipedal robot standing 1.3 meters tall with 29 degrees of freedom, designed for research in locomotion, manipulation, and human-robot interaction.
Dataset Properties
Motion Categories
Stairs, slopes, varied terrain
Boxes, tools, picking tasks
Combined loco-manipulation
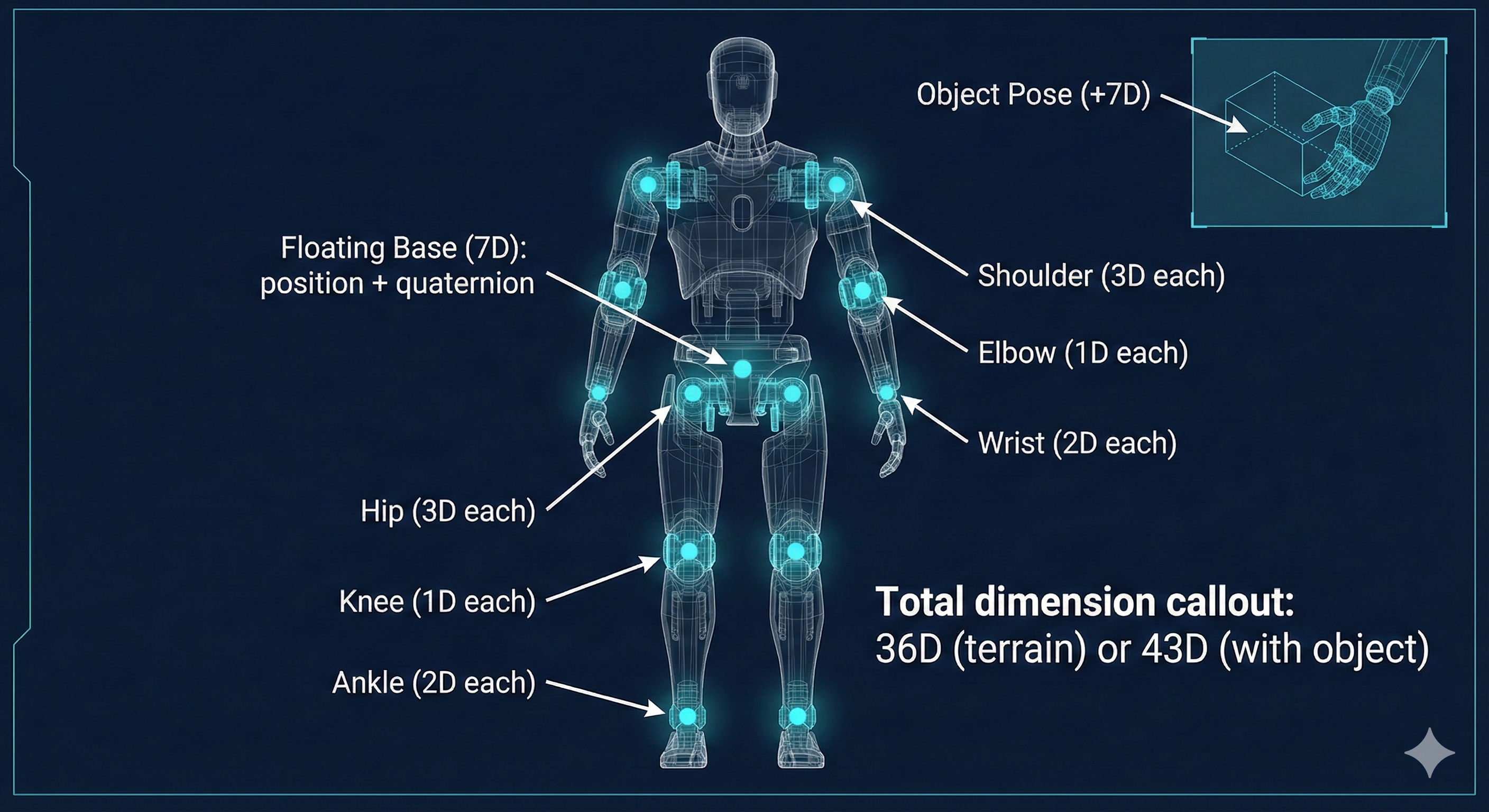
The G1's 29 degrees of freedom plus floating base and object pose create a 36-43 dimensional state space
Two-Pass Analysis Architecture
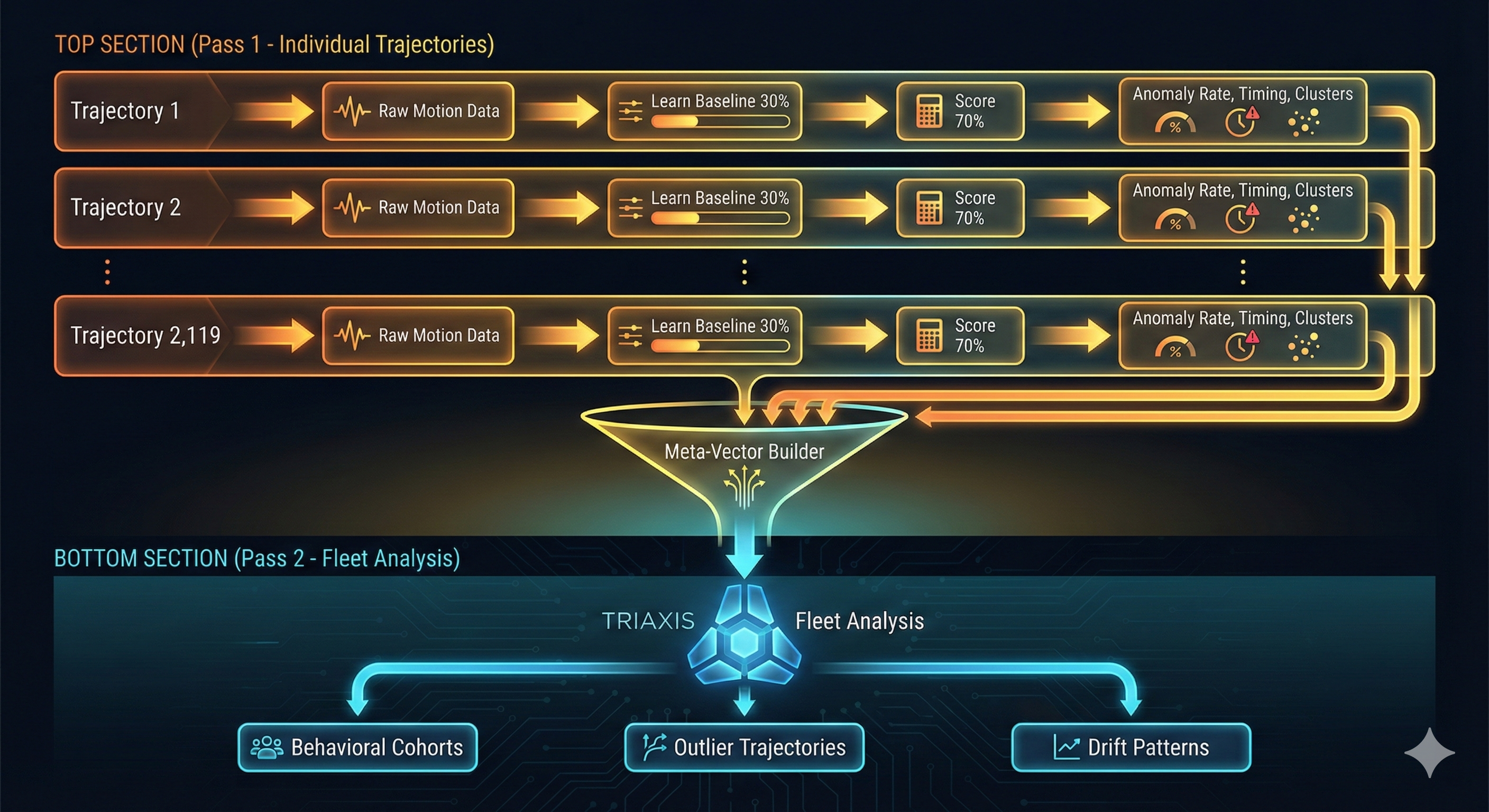
Pass 1 analyzes individual trajectories; Pass 2 discovers fleet-level patterns from meta-vectors
Per-Entity Analysis
For each of 2,119 trajectories:
- Reset Triaxis AI state (fresh learning context)
- Learn baseline from first 30% of timesteps
- Score remaining 70% against learned baseline
- Record anomalies detected, rate, timing
Fleet-Level Discovery
Build meta-vectors containing:
- Anomaly rate and count from Pass 1
- Behavioral modes (clusters found)
- Trajectory metadata (timesteps, dimensions)
- Discover cohorts and outliers across fleet
The Drift Detection Breakthrough
The most significant finding: reproducible, task-specific drift detection. Anomalies increase by nearly 24 percentage points from trajectory start to end.
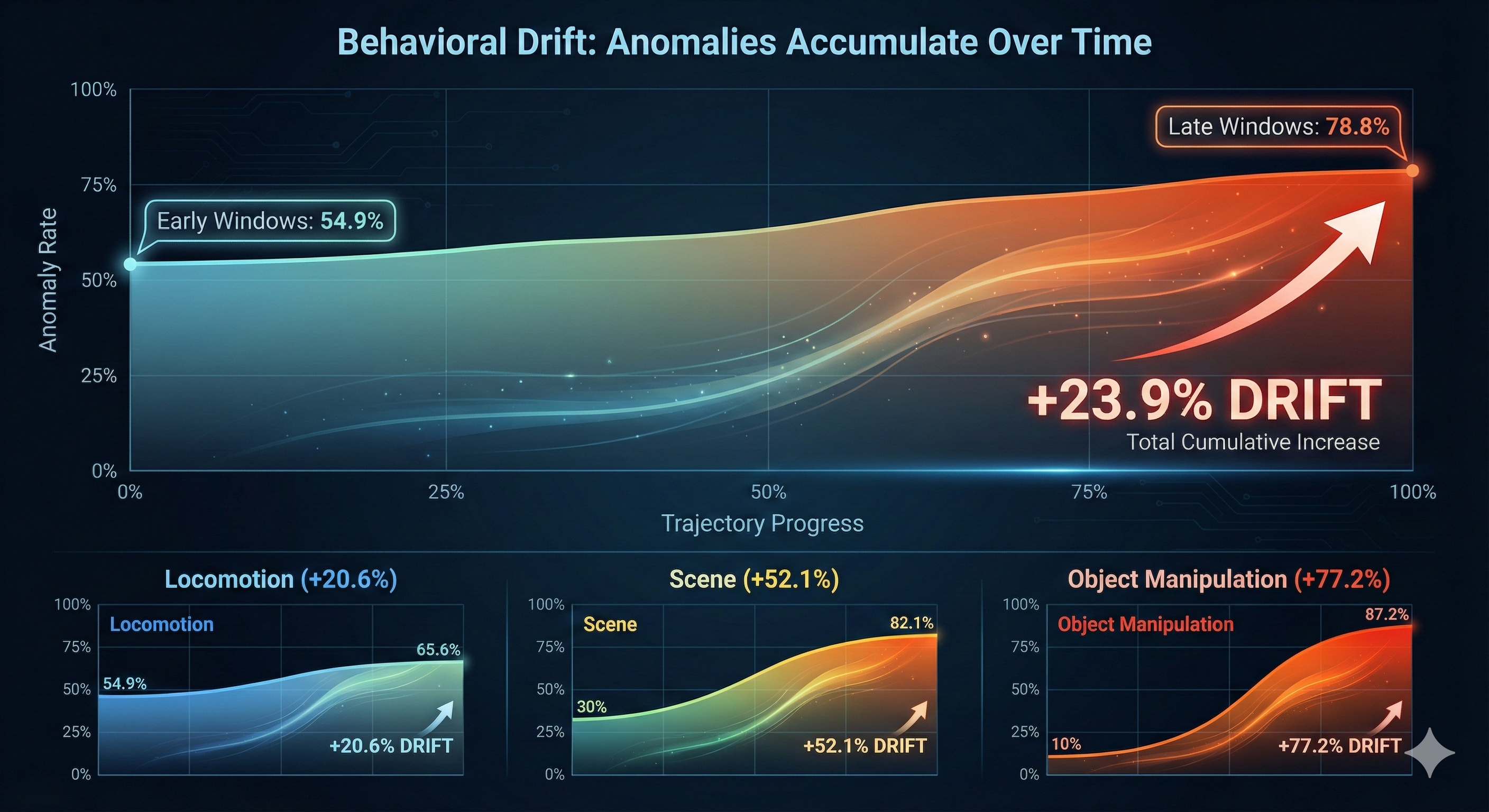
Anomaly rate increases systematically from 54.9% (early) to 78.8% (late) - a strong drift signal
Hand-object interactions show extreme degradation over time
Environmental navigation shows high behavioral drift
Physical motion fatigue is predictable and moderate
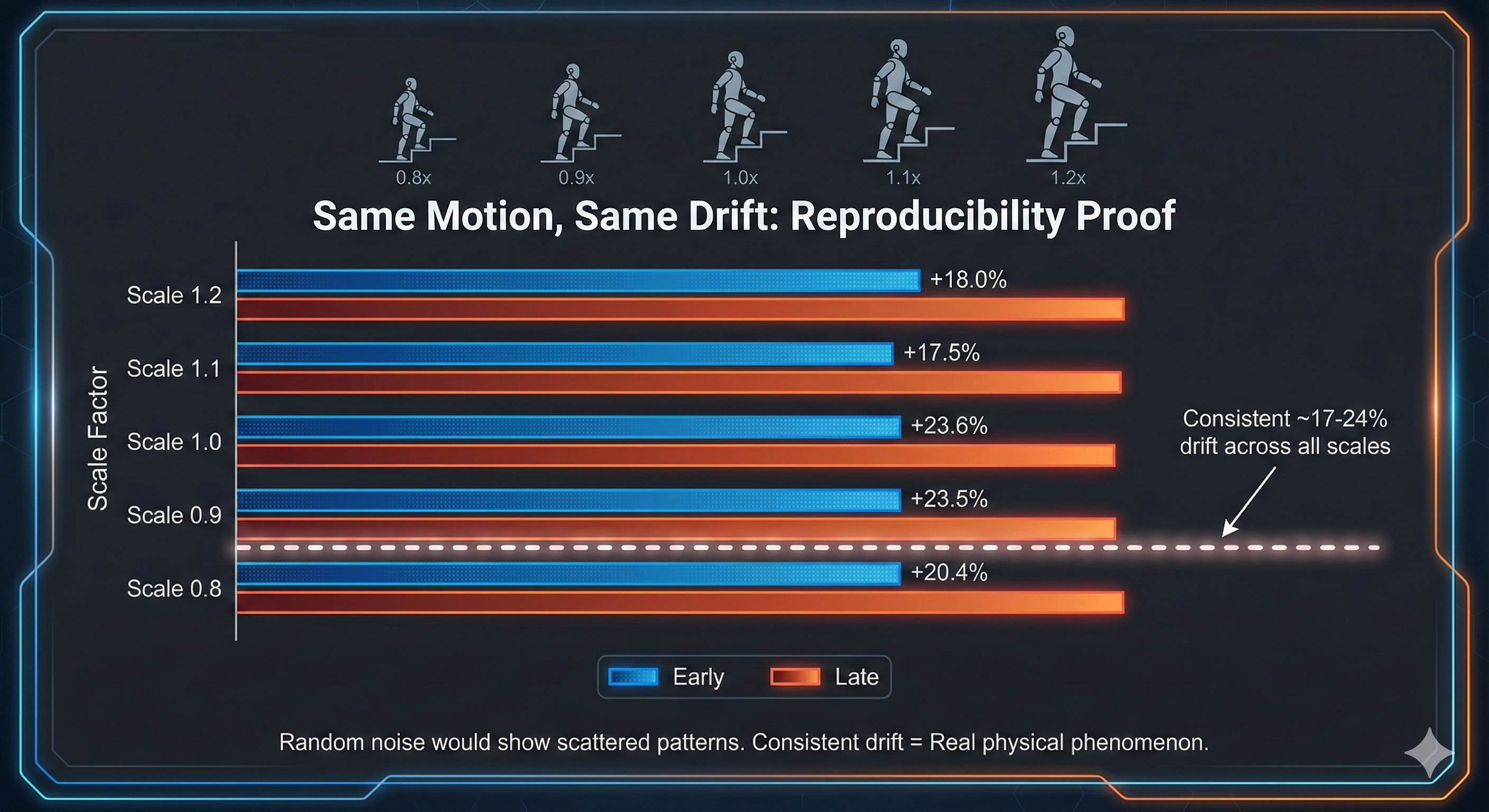
The "climb" motion at 5 different scale factors shows consistent ~17-24% drift - proving reproducibility
Why This Matters
Motion-specific: Different tasks have signature drift rates. Object manipulation (+77%) degrades faster than locomotion (+20%).
Reproducible: Same action shows same drift every time. This isn't noise - it's a physical phenomenon.
Predictable: Enables degradation forecasting and predictive maintenance before component failure.
Zero Labels Required: All patterns discovered without any training data or failure examples.
Statistical Validation: Cohen's d Analysis
All comparisons are highly significant (p < 0.001). Effect sizes confirm clear separation between early and late behavioral windows.
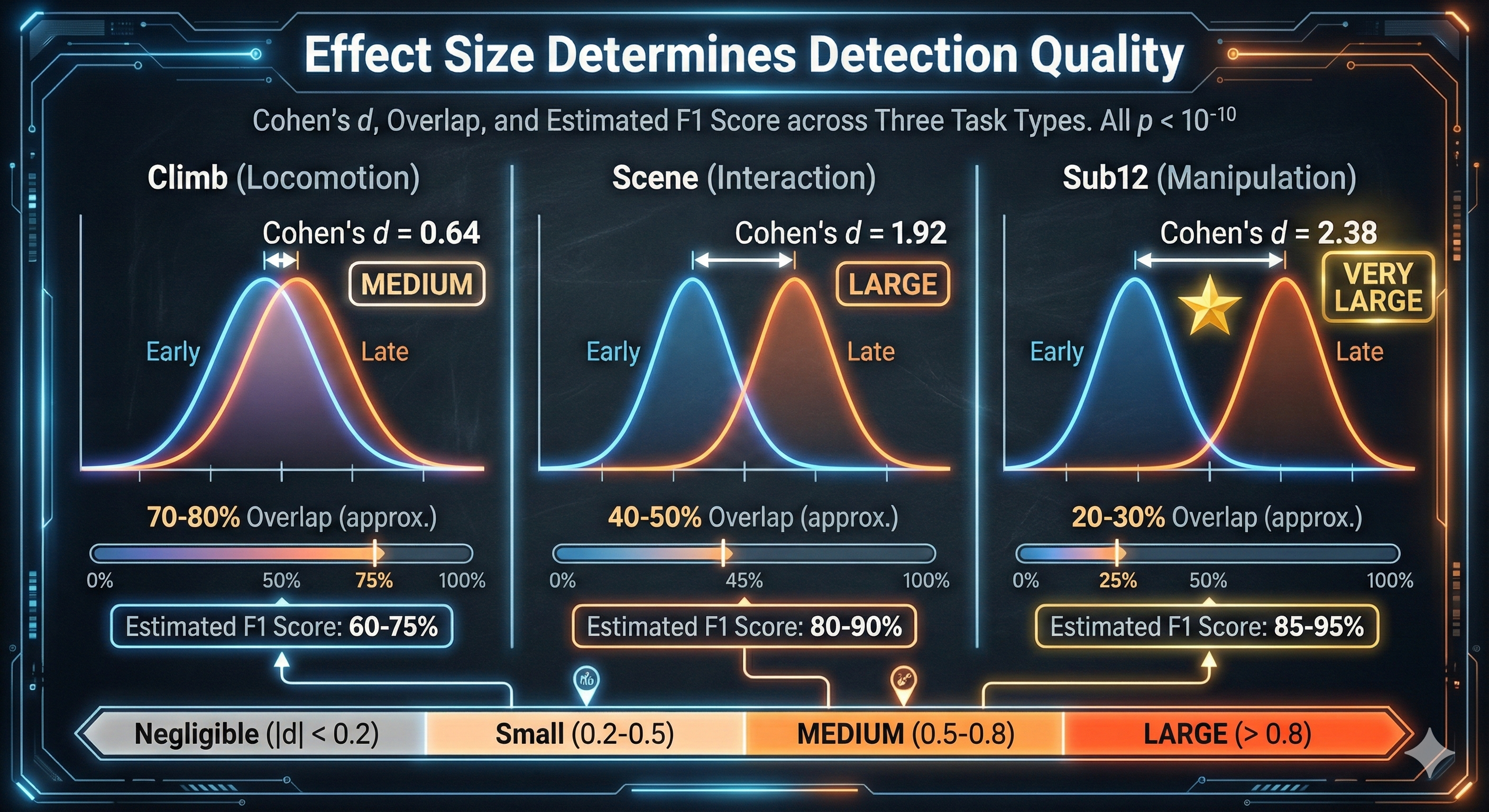
Larger effect sizes indicate clearer separation and higher expected detection quality
| Task | Cohen's d | Effect Size | p-value | Estimated F1 |
|---|---|---|---|---|
| Overall | 0.64 | MEDIUM | < 10^-20 | 60-75% |
| Climb (Locomotion) | 0.64 | MEDIUM | < 10^-11 | 60-75% |
| Scene (Interaction) | 1.92 | LARGE | < 10^-33 | 80-90% |
| Sub12 (Manipulation) | 2.38 | VERY LARGE | < 10^-26 | 85-95% |
Real-Time Capability: 930 Hz Processing
Speed isn't just a nice-to-have - it's required for safety-critical robotics applications. A detection system that takes 10 seconds to process 1 second of data cannot prevent falls or protect joints.
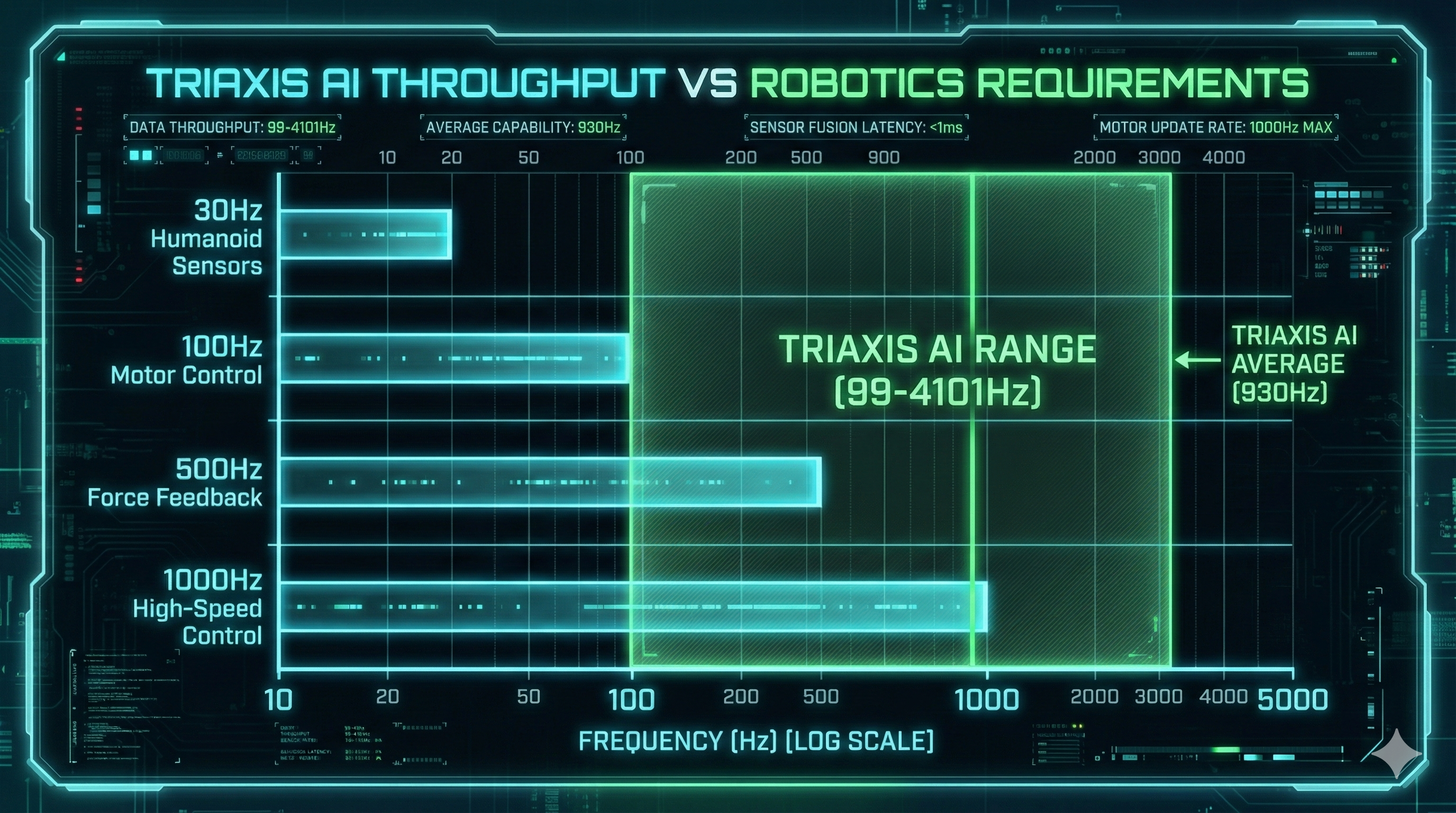
Triaxis AI exceeds all common robotics sensor rates with substantial headroom
Scoring Throughput
Edge Deployment Analysis
For a 43-dimensional joint state at 30 Hz:
Can process 21 joint streams at full sensor rate, OR 1 stream with 21x margin for other tasks
The Reflexive AI Opportunity
With 930 Hz average throughput - 31x faster than typical robot sensor rates - Triaxis AI opens a provocative possibility: anomaly detection fast enough to function as a machine reflex, responding to danger before the central controller knows something is wrong.
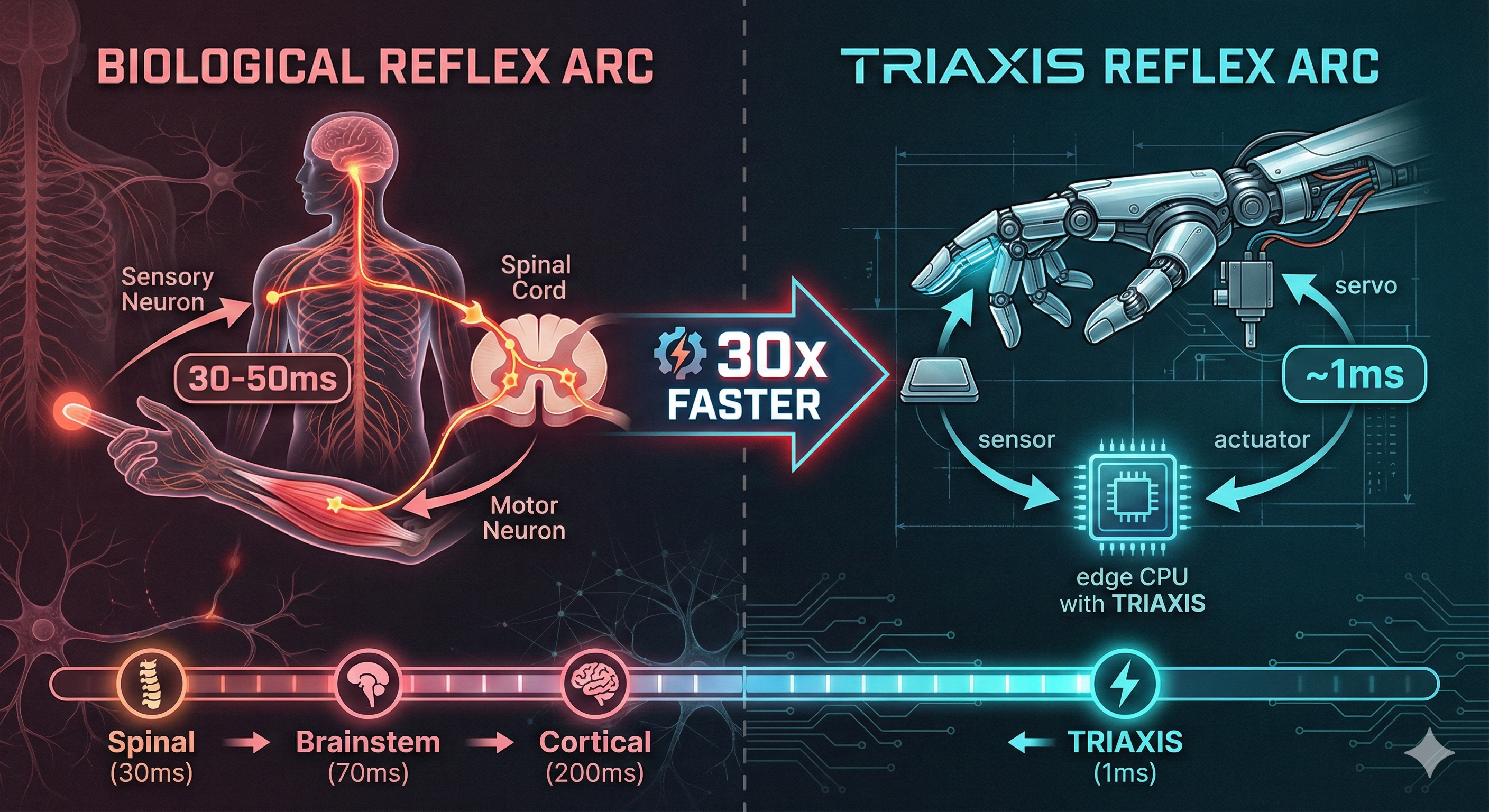
Triaxis AI can detect anomalies in ~1ms - faster than biological spinal reflexes (30-50ms)
Biological Reflexes
Triaxis AI Detection
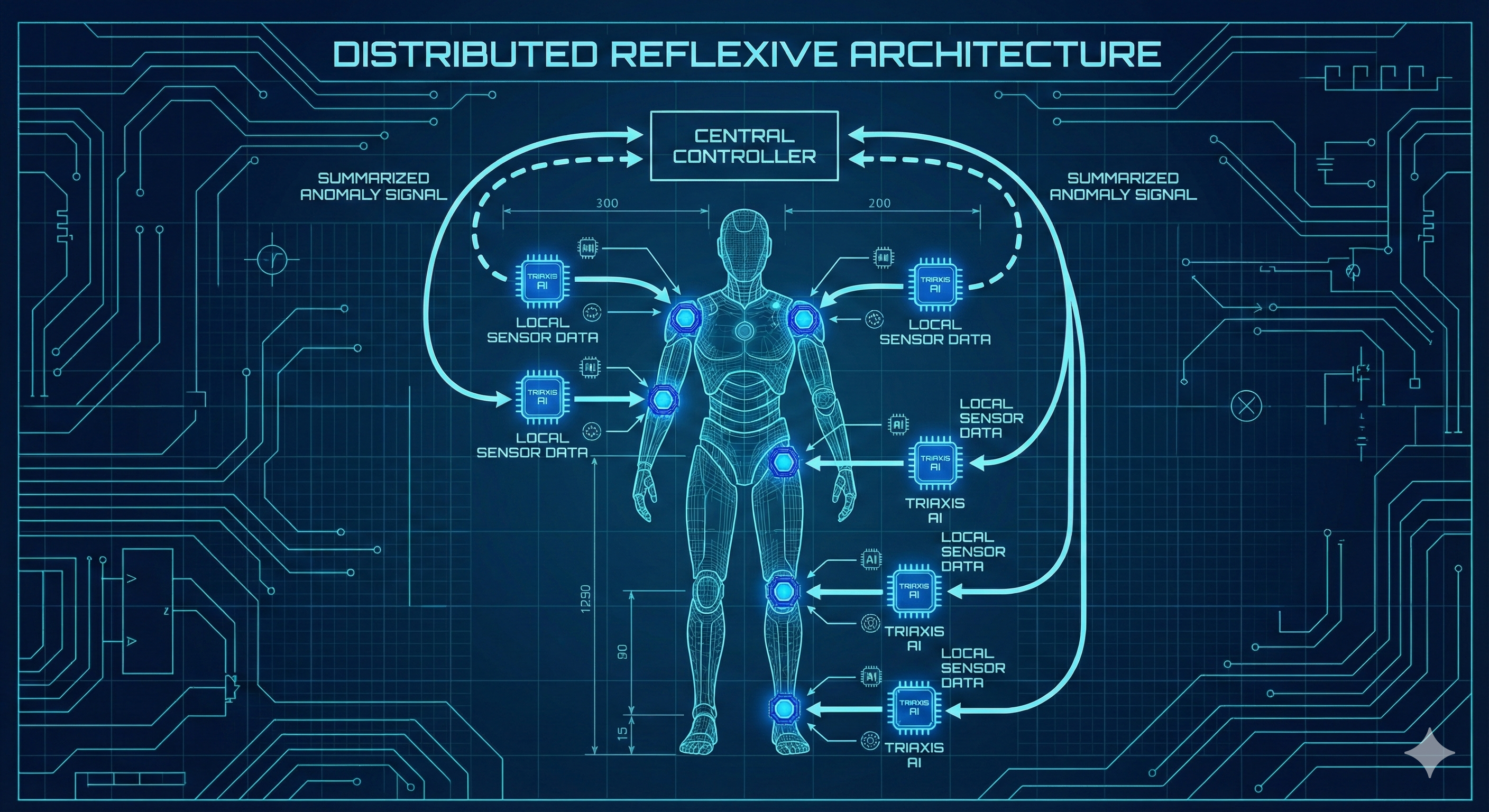
Edge-deployed Triaxis AI at each joint enables local protective responses in 1-10ms
| Application | Traditional | With Reflexive Triaxis AI |
|---|---|---|
| Fall Prevention | Detect after fall begins | Detect instability onset, pre-emptive correction |
| Grip Failure | Object drops, then respond | Detect grip degradation, adjust before failure |
| Joint Stress | Post-hoc analysis | Real-time monitoring, prevent damage |
| Collision | Impact, then stop | Detect anomalous force patterns, abort motion |
Unsupervised Discovery of Task Categories
Does Triaxis AI actually understand robot behavior, or just detect statistical noise? Pass 2 fleet analysis validates that discovered patterns correspond to meaningful task categories - without being told about them.
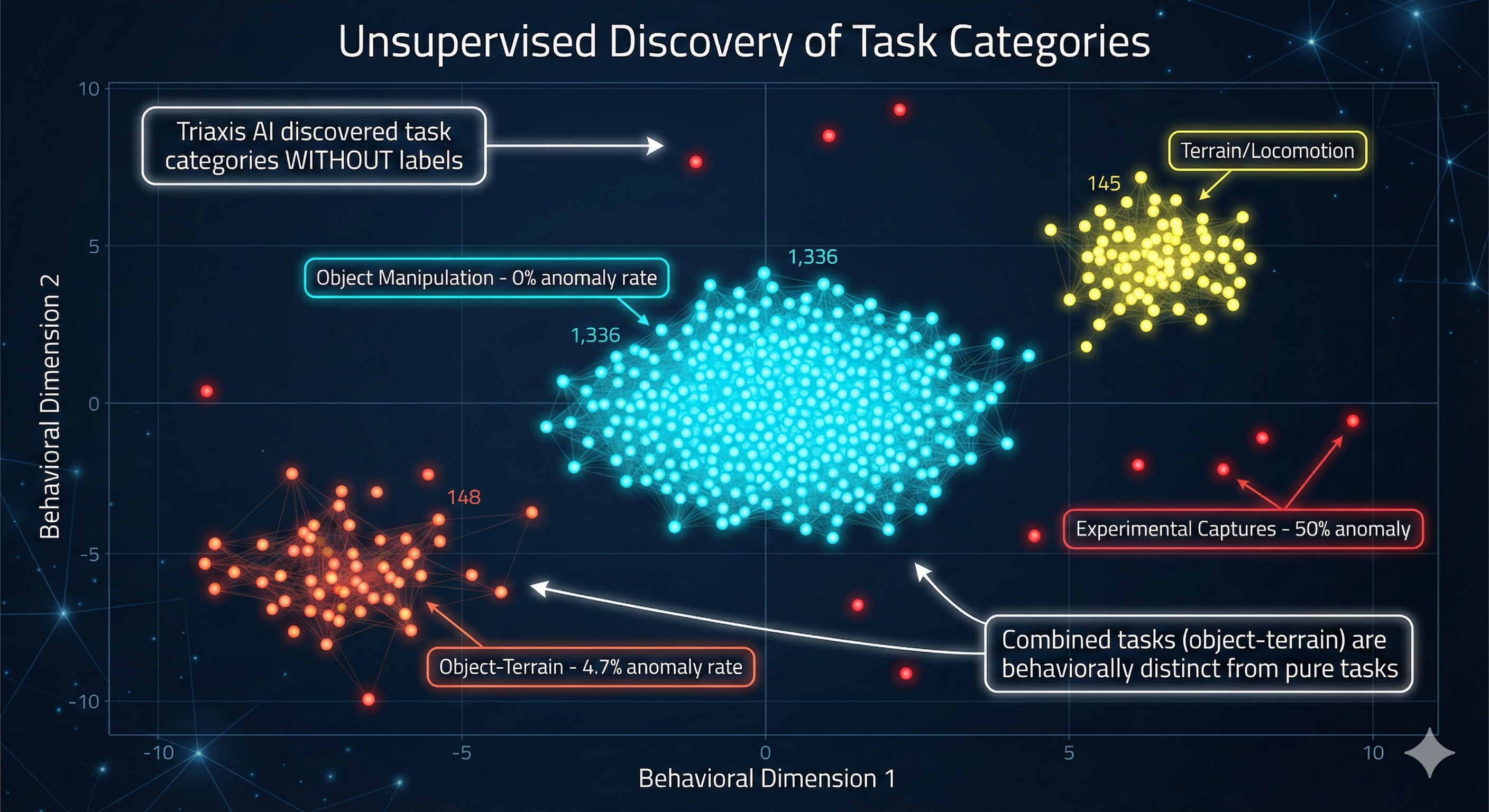
Triaxis AI correctly separated task categories from geometry alone - object-terrain shows elevated anomaly rates
1,336 trajectories - consistent behavioral patterns
148 trajectories - elevated anomaly rate, behaviorally distinct
Timestamped recordings - correctly flagged as outliers
What Triaxis AI Uniquely Contributes
Prior robotics anomaly detection work required labeled failure data - examples of things going wrong. Triaxis AI discovers drift patterns without any labels.
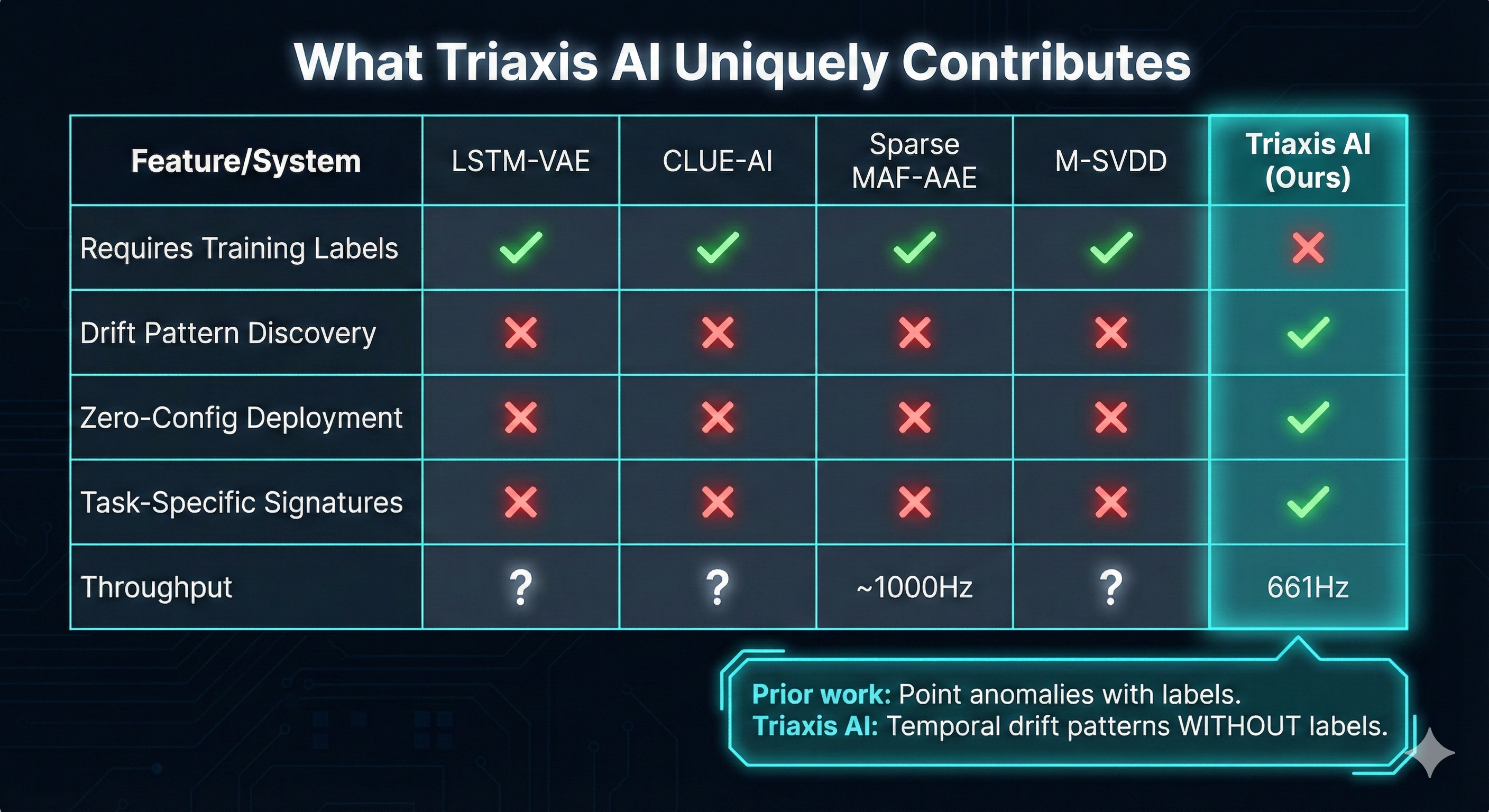
Prior work: Point anomalies with labels. Triaxis AI: Temporal drift patterns without labels.
| Capability | LSTM-VAE | CLUE-AI | MAF-AAE | Triaxis AI |
|---|---|---|---|---|
| Requires Training Labels | Yes | Yes | Yes | No |
| Drift Pattern Discovery | - | - | - | Yes |
| Zero-Config Deployment | - | - | - | Yes |
| Task-Specific Signatures | - | - | - | Yes |
| Throughput | ? | ? | ~1000 Hz | 930 Hz |
Industry Implications for Manufacturing Robotics
As humanoid robots transition from labs to factories and homes, companies face a critical capability gap: monitoring behavioral health at scale without expensive failure-mode training data.

Major robotics players need behavioral health monitoring that scales - Triaxis AI delivers it
Industry Challenges
Labeled failure data is expensive/dangerous to obtain
Rules can't capture complex multi-joint patterns
Batch processing is too slow for safety
Different robots need different models
Triaxis AI Solutions
Zero-label operation - learns baseline from normal operation
Geometric detection - finds high-dimensional relationships
930 Hz real-time - enables pre-emptive intervention
Domain-agnostic - same algorithm across platforms
Commercial Use Cases
Predictive Maintenance
Detect +77% drift in manipulation before component failure
Safety Certification
Demonstrate continuous monitoring to regulators (OSHA, etc.)
Fleet Management
Two-pass architecture enables centralized health monitoring
Edge Deployment
21.4x headroom enables on-robot processing
The Future: Proactive Robot Safety
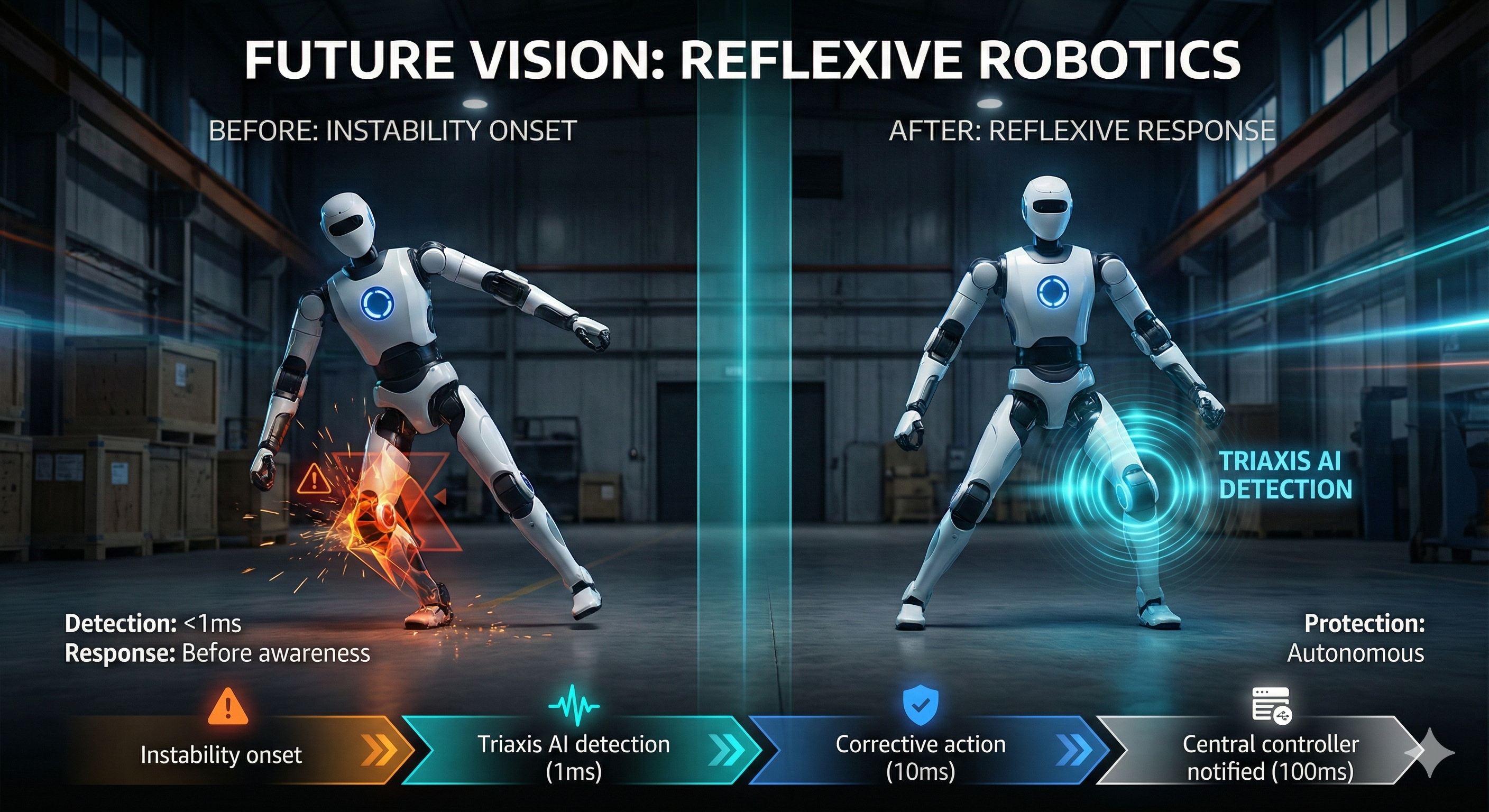
Detection in <1ms enables protective responses before the central controller is aware
If Proven on Physical Robots, This Capability Transforms Safety
Proactive Instead of Reactive
Detect instability before falls, not after
Distributed Instead of Centralized
Local edge detection at each joint
Real-Time Instead of Post-Hoc
Intervention fast enough to prevent damage
Predictive Instead of Descriptive
Forecast degradation trajectories
Key Takeaways
930 Hz Processing
31x faster than real-time robot sensors. Fast enough for machine reflexes that respond before the central controller knows something is wrong.
+23.9% Drift Detection
Systematic behavioral degradation from trajectory start to end. Task-specific signatures: +77% for manipulation, +20% for locomotion.
Zero Training Data
Solves the labeling problem. No failure examples needed. Learns baseline from normal operation and detects deviations in real-time.
Edge Deployment Ready
21.4x headroom enables on-robot processing. Distributed architecture for local protective responses at sub-millisecond latency.
Transform Your Robotics Operations
Ready to deploy real-time behavioral monitoring that doesn't require failure data? Contact us to discuss how Triaxis AI can enable predictive maintenance and reflexive safety for your manufacturing robotics.